動力學(xué)與控制
2021-11-09 06:26
力學(xué)學(xué)報 2021年7期
CaputoΔ型分?jǐn)?shù)階時間尺度Noether 定理(2010-2022,doi:10.6052/0459-1879-21-108)田雪,張毅
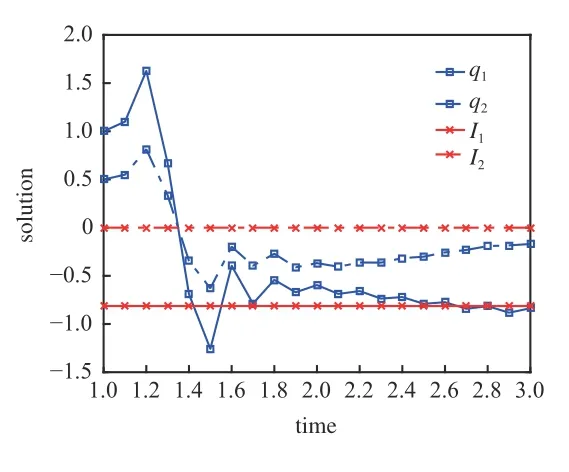
結(jié)合時間尺度和分?jǐn)?shù)階微積分,研究含CaputoΔ導(dǎo)數(shù)的分?jǐn)?shù)階時間尺度Noether 定理,為研究復(fù)雜系統(tǒng)動力學(xué)行為提供了一個新的視角.文中推導(dǎo)出CaputoΔ型分?jǐn)?shù)階時間尺度Lagrange 方程,分別在特殊和一般無限小變換下給出該系統(tǒng)Noether 對稱性的定義和判據(jù),并得到相應(yīng)的Noether 定理.最后,對分?jǐn)?shù)階時間尺度Kepler 問題和線性振動系統(tǒng)進(jìn)行數(shù)值計算以驗證定理的正確性.
一類新型仿生起豎結(jié)構(gòu)設(shè)計及其動力學(xué)分析(2023-2036,doi:10.6052/0459-1879-21-176)錢佳偉,孫秀婷,徐鑒,方虹斌
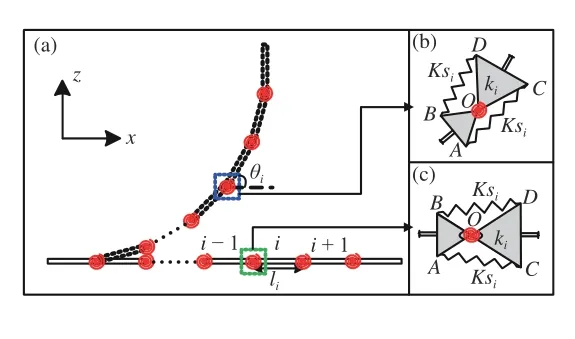
本文提出了一種具有非線性多穩(wěn)態(tài)性質(zhì)的仿生柔性關(guān)節(jié),構(gòu)建了多節(jié)仿生起豎結(jié)構(gòu)以實現(xiàn)生物的起豎功能.本文提出了實現(xiàn)需求起豎構(gòu)型的結(jié)構(gòu)參數(shù)設(shè)計準(zhǔn)則,并設(shè)計了不同起豎節(jié)數(shù)的仿生起豎結(jié)構(gòu)驗證了設(shè)計準(zhǔn)則的有效性.基于仿生起豎結(jié)構(gòu)不同穩(wěn)態(tài)的吸引盆,研究了仿生起豎結(jié)構(gòu)需求構(gòu)型的觸發(fā)條件,這為仿生起豎結(jié)構(gòu)的構(gòu)型切換提供了理論依據(jù).
基于分?jǐn)?shù)階磁流變液阻尼器模型的車輛懸架組合控制(2037-2046,doi:10.6052/0459-1879-21-137)張文靜,牛江川,申永軍,溫少芳
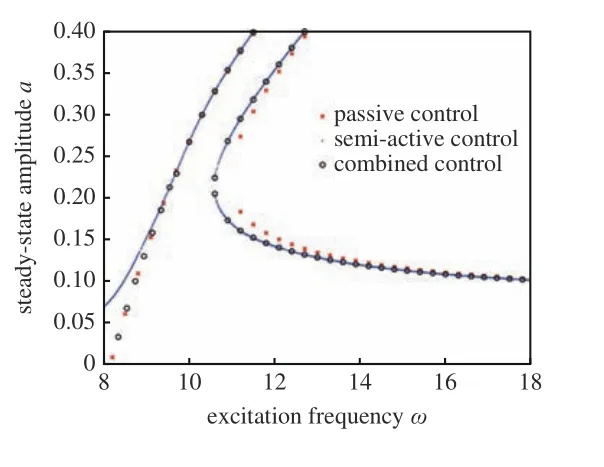
建立了含有分?jǐn)?shù)階Bingham 模型的單自由度1/4 車輛懸架系統(tǒng)模型,利用磁流變液阻尼器對非線性懸架進(jìn)行振動控制.利用平均法得到了懸架系統(tǒng)在天棚阻尼半主動控制下主共振響應(yīng)的近似解析解,以及系統(tǒng)的穩(wěn)定性條件.提出了一種被動控制與半主動控制相結(jié)合的組合控制策略,不但能夠提高車輛的乘坐舒適性,而且能有效抑制懸架系統(tǒng)的主共振振動幅值.
基于LSTM 模型的飛行器智能制導(dǎo)技術(shù)研究(2047-2057,doi:10.6052/0459-1879-20-388)汪韌,惠俊鵬,俞啟東,李天任,楊奔
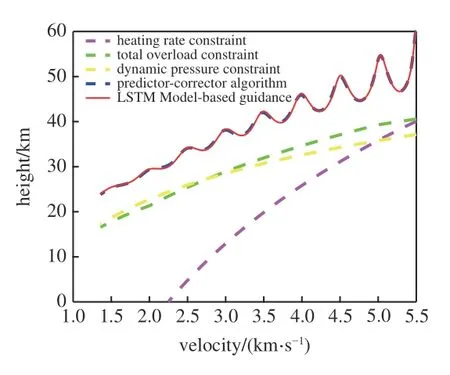
人工智能的突破性進(jìn)展為飛行器再入制導(dǎo)的研究提供了新的技術(shù)途徑,本文提出基于LSTM 模型的飛行器智能制導(dǎo)技術(shù).基于再入飛行器的實時狀態(tài)信息,采用LSTM 模型實時生成傾側(cè)角指令,去除傳統(tǒng)預(yù)測校正制導(dǎo)中“預(yù)測環(huán)節(jié)”和“校正環(huán)節(jié)”,制導(dǎo)指令的解算速度提升73.7%,在飛行器再入初始狀態(tài)和氣動參數(shù)拉偏情況下具有精度和速度上的雙重優(yōu)勢.
猜你喜歡
軍民兩用技術(shù)與產(chǎn)品(2022年1期)2022-06-01
西北工業(yè)大學(xué)學(xué)報(2022年1期)2022-04-22
云南大學(xué)學(xué)報(自然科學(xué)版)(2022年1期)2022-02-21
北京航空航天大學(xué)學(xué)報(2021年4期)2021-11-24
北京航空航天大學(xué)學(xué)報(2021年6期)2021-07-20
能源工程(2021年1期)2021-04-13
蘇州科技大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-03-24
中學(xué)生數(shù)理化(高中版.高考理化)(2021年12期)2021-03-08
中國新技術(shù)新產(chǎn)品(2020年19期)2020-12-25
蘇州科技大學(xué)學(xué)報(自然科學(xué)版)(2020年1期)2020-04-13