
具反饋控制的一方不能獨(dú)立生存偏利合作系統(tǒng)的穩(wěn)定性
2018-03-26 19:23:24楊英鐘王寬程
楊英鐘,王寬程
(閩南理工學(xué)院信息管理學(xué)院,福建 泉州 362700)
1 引言
近年來,很多學(xué)者針對合作生態(tài)系統(tǒng)的持久性展開了研究,并得到了相應(yīng)的研究成果[1-4].而有關(guān)偏利合作種群模型的研究工作還很少,祝占法等[5]提出了如下一方不能獨(dú)立生存的兩種群偏利合作模型:

其中bi,aij,i,j=1,2均為正常數(shù),xi,i=1,2是種群在t時刻的生長密度.作者借助向量場分析的方法得出當(dāng)
時,系統(tǒng)(1.1)存在唯一全局漸近穩(wěn)定的正平衡點(diǎn),并得出種群弱平均持續(xù)生存和絕滅的充分性條件.
另一方面,在現(xiàn)實(shí)生活中,考慮到生態(tài)系統(tǒng)會受到人類的干擾,為此,學(xué)者們引入了反饋控制變量.2016年,周曉燕等[6]提出如下具有反饋控制的單方不能獨(dú)立生存合作模型:
其中ui,i=1,2是反饋控制變量.在文獻(xiàn)[6]中,作者通過構(gòu)造適當(dāng)?shù)腖yapunov函數(shù),得到研究表明,在原系統(tǒng)存在唯一的全局漸近穩(wěn)定的正平衡點(diǎn)時,引入適當(dāng)?shù)姆答伩刂谱兞?系統(tǒng)(1.2)仍具有唯一的全局漸近穩(wěn)定的正平衡點(diǎn);引入不適當(dāng)?shù)姆答伩刂谱兞?則不能獨(dú)立生存的第二種群終將絕滅.
注意到至今尚未有學(xué)者研究具反饋控制的一方不能獨(dú)立生存的偏利合作系統(tǒng):
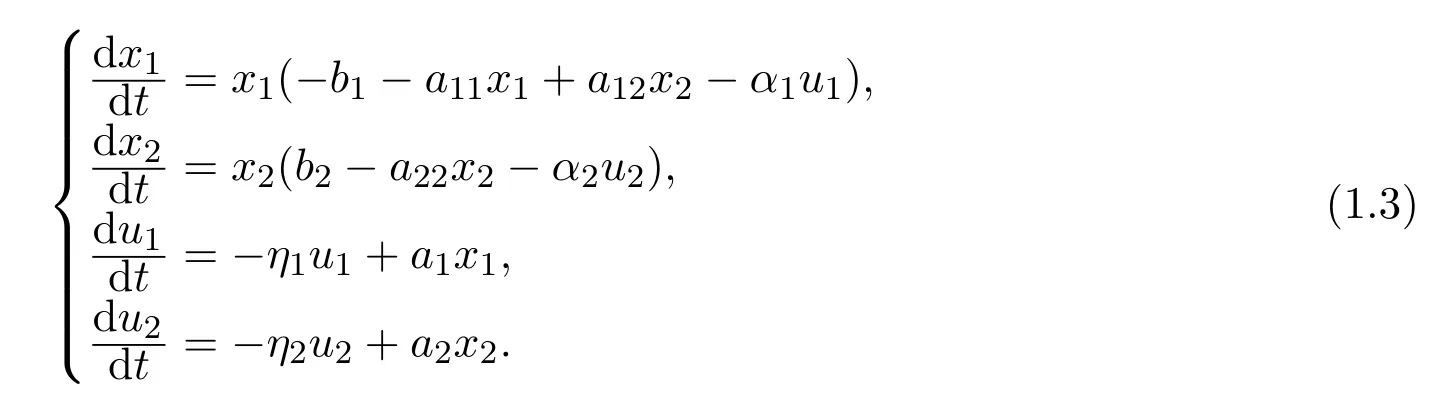
其中,系統(tǒng)(1.3)的所有參數(shù)ai,bi,aij,αi,ηi,i,j=1,2均為正常數(shù),xi,i=1,2是種群在t時刻的生長密度,ui,i=1,2是反饋控制變量.其中第二種群對第一種群的生長起有利作用,而第一種群對第二種群的生長不起作用,而且第一種群不能獨(dú)立生存.本文旨在研究反饋控制變量對系統(tǒng)(1.3)正平衡點(diǎn)和邊界平衡點(diǎn)動力學(xué)行為的影響.
2 主要結(jié)果及其證明
計(jì)算易知當(dāng)條件

下面探討系統(tǒng)(1.3)平衡點(diǎn)的穩(wěn)定性.
定理 2.1若

證明注意到滿足:
現(xiàn)構(gòu)造Lyapunov函數(shù):

其中λi,i=1,2,3,4是待定正常數(shù).沿著系統(tǒng)(1.3)的正解計(jì)算V1(t)的導(dǎo)數(shù),借助(2.1)可得:

令

則有

因?yàn)閍11λ1>0,
所以矩陣

是正定矩陣.
這表明
則由文獻(xiàn) [7]的 Lyapunov穩(wěn)定性定理可知,正平衡點(diǎn)是全局漸近穩(wěn)定的.
注 2.1定理2.1表明對于一方不能獨(dú)立生存的偏利合作系統(tǒng)而言,在原系統(tǒng)(1.1)具有唯一的全局漸近穩(wěn)定的正平衡點(diǎn)的情況下,反饋控制變量僅改變正平衡點(diǎn)的位置,使得種群的平衡密度發(fā)生改變,而不會改變正平衡點(diǎn)的穩(wěn)定性.
定理 2.2若
證明注意到滿足:

現(xiàn)構(gòu)造Lyapunov函數(shù):

其中δi,i=1,2,3,4是待定正常數(shù).沿著系統(tǒng)(1.3)的正解計(jì)算V2(t)的導(dǎo)數(shù),借助(2.2)可得:
令

則有
因?yàn)閍11δ1>0,
所以矩陣
是正定矩陣.
又因?yàn)楫?dāng)
時,

成立.所以

這表明
當(dāng)且僅當(dāng)x1=0,x2=x?2,u1=0,u2=u?2時,
注 2.2當(dāng)

時,原系統(tǒng)(1.1)存在唯一的全局漸近穩(wěn)定的正平衡點(diǎn),但加入反饋控制變量后,系統(tǒng)(1.3)只存在唯一穩(wěn)定的邊界平衡點(diǎn),這時不能獨(dú)立生存的第一種群將最終走向滅絕.這表明不當(dāng)?shù)娜祟惛蓴_反而不利于系統(tǒng)中生物種群的生長.
注 2.3值得注意的是,定理2.1和定理2.2的條件只含有跟第二個反饋控制變量u2有關(guān)的量a2和η2,而與u1無關(guān).這說明第二個反饋控制變量u2影響系統(tǒng)(1.3)種群的生存,而第一個反饋控制變量u1與種群生存無關(guān),僅影響種群的平衡密度.
3 數(shù)值模擬
以下通過具體的例子來驗(yàn)證定理的可行性.
例 3.1考慮如下系統(tǒng):

這里相對于系統(tǒng)(1.1),其中b1=1,b2=2,a11=0.5,a12=2,a22=1,則
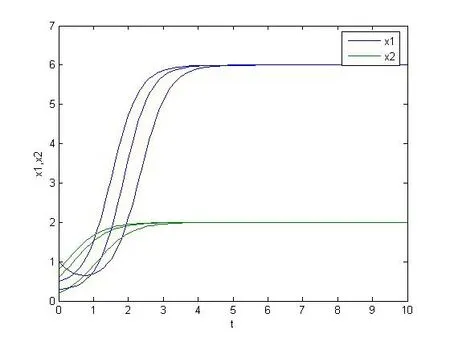
圖1 系統(tǒng)(3.1)的數(shù)值模擬圖
例 3.2考慮如下具有反饋控制變量的系統(tǒng):
(1)滿足定理2.1的實(shí)例
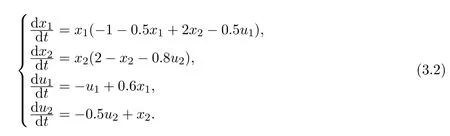
相對于例3.1,系統(tǒng)(3.2)增加系數(shù)

則
滿足定理2.1的條件
所以系統(tǒng)(3.2)存在唯一全局漸近穩(wěn)定的正平衡點(diǎn)

系統(tǒng)(3.2)具有初值

的解的數(shù)值模擬圖,如圖2所示:
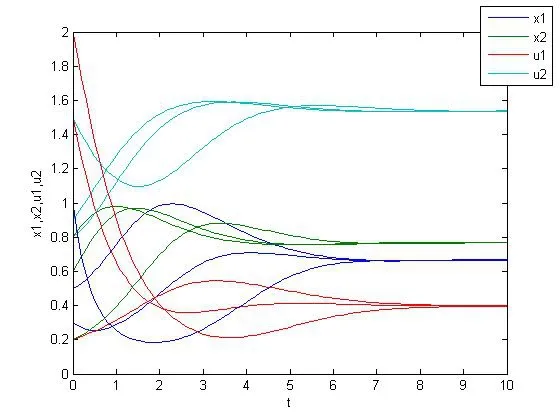
圖2 系統(tǒng)(3.2)的數(shù)值模擬圖
(2)滿足定理2.2的實(shí)例
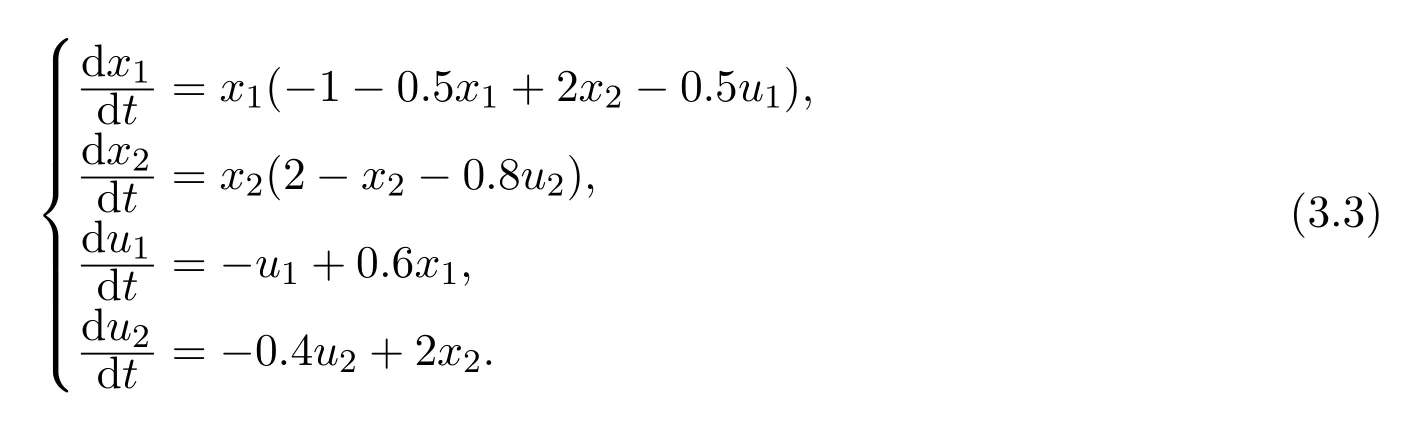
相對于系統(tǒng)(3.2),系統(tǒng) (3.3)將η2和a2的值修改為η2=0.4,a2=2,則
滿足定理2.2的條件

所以系統(tǒng)(3.2)存在全局漸近穩(wěn)定的邊界平衡點(diǎn)P2(0,0.4,0,2).系統(tǒng)(3.3)具有初值的解的數(shù)值模擬圖,如圖3所示:


圖3 系統(tǒng)(3.3)的數(shù)值模擬圖
[1]趙亮,陳鳳德.具有反饋控制的競爭系統(tǒng)邊界平衡點(diǎn)的穩(wěn)定性[J].北華大學(xué)學(xué)報(bào),2013,14(5):516-519.
[2]楊坤,王海娜,陳鳳德.反饋控制Lotka-Volterra合作系統(tǒng)穩(wěn)定性研究[J].應(yīng)用數(shù)學(xué),2014,27(2):243-247.
[3]陳鳳德,龔曉杰,普麗瓊,等.具有反饋控制的 Lotka-Volterra捕食 -食餌系統(tǒng)研究[J].生物數(shù)學(xué)學(xué)報(bào),2015,30(2):328-332.
[4]黃宏韜,林錦賢.具有反饋控制變量的偏害模型穩(wěn)定性研究[J].福州大學(xué)學(xué)報(bào),2017,45(1):69-73.
[5]祝占法,粟永安,徐芳.具有偏利關(guān)系的Lotka-Volterra模型[J].重慶工學(xué)院學(xué)報(bào)(自然科學(xué)版),2007,21(10):59-62.
[6]周曉燕,普麗瓊,薛亞龍,等.具反饋控制的單方不能獨(dú)立生存合作系統(tǒng)穩(wěn)定性研究 [J].應(yīng)用數(shù)學(xué)學(xué)報(bào),2016,39(2):298-305.
[7]陳蘭蓀,宋新宇,陸征一.數(shù)學(xué)生態(tài)學(xué)模型與研究方法[M].成都:四川科學(xué)技術(shù)出版社,2003.
猜你喜歡
今日農(nóng)業(yè)(2022年15期)2022-09-20 06:54:16
數(shù)學(xué)物理學(xué)報(bào)(2022年4期)2022-08-22 04:07:12
數(shù)學(xué)物理學(xué)報(bào)(2022年2期)2022-04-26 14:08:04
煙臺果樹(2019年1期)2019-01-28 09:34:58
紅土地(2018年7期)2018-09-26 03:07:38
金橋(2018年4期)2018-09-26 02:24:54
傳媒評論(2018年7期)2018-09-18 03:45:52
IT時代周刊(2015年7期)2015-11-11 05:49:56
中國衛(wèi)生(2014年5期)2014-11-10 02:11:26
散文百家(2014年11期)2014-08-21 07:16:58
