
An extended smart driver model considering electronic throttle angle changes with memory
2022-01-23 06:35CongzhiWu武聰智HongxiaGe葛紅霞andRongjunCheng程榮軍
Chinese Physics B 2022年1期
Congzhi Wu(武聰智) Hongxia Ge(葛紅霞) and Rongjun Cheng(程榮軍)
1Faculty of Maritime and Transportation,Ningbo University,Ningbo 315211,China
2Jiangsu Province Collaborative Innovation Center for Modern Urban Traffic Technologies,Nanjing 210096,China
3National Traffic Management Engineering and Technology Research Centre Ningbo University Sub-centre,Ningbo 315211,China
Keywords: smart driver model(SDM),electronic throttle angle changes with memory(ETSDM),parameter calibration,stability analysis
1. Introduction
The popularization of motor vehicle not only facilitates people’s travel, but also improves the work efficiency. However, as the number of motor vehicle increases year by year,the traffic problems caused by them have become increasingly serious. In order to fundamentally solve the problem of the traffic congestion, some scholars have studied the formation mechanism and evolution law of the traffic congestion.[1-5]
To find out the root cause of the traffic congestion, it is necessary to analyze the dynamic changes of each car in detail. Therefore, some scholars have carried out research on the speed changes and car-following methods of adjacent vehicles.[6-12]Liet al.[8]combined the opening angle of the electronic throttle on the basis of the full velocity difference model,so that the proposed model can effectively and quickly eliminate the external disturbances. Zhaiet al.[12]put forward a car-following model considering electronic throttle, which reveals that the electronic throttle opening angle effect has a considerable impact on the stability of traffic flow.Meanwhile,it is also very important to analyze the overall evolution of traffic flow from a macro perspective.[13-19]Qinet al.[13]discussed the effect of electronic throttle on the stability of mixed traffic flow. Jiaoet al.[14]proposed a new macro model,which contains electronic throttle(ET)and ramp factors. The results indicated that the ET effect play an important role in alleviating traffic congestion to a certain extent.
In 2000, Treiberet al.[20]proposed an intelligent driver model (IDM), which can describe the phase transition from free flow to the congested flow in a unified form. IDM provides a new way to solve the problem of traffic congestion,and many scholars have developed new research on traffic problems based on it.[21-24]Subsequently,in order to alleviate the traffic congestion caused by the influx of vehicles, Treiberet al.[25,26]optimized the IDM and modified the situation that the actual velocity exceeded the expected velocity. Liuet al.[27]discussed the different car following combinations in heterogeneous traffic flow on the basis of IDM,and conducted NGSIM data calibration and simulation experiments on the extended model. Qinet al.[28]proposed an extended IDM by using the electronic throttle as a feedback item of IDM,and the results show that the extended model can improve the safety and traffic efficiency.
Milaneset al.[29]pointed out that IDM model can produce smooth following behavior,but the response is very slow and the gap changes greatly,which leads to the subsequent vehicle response instability. To address these issues,Luet al.[30]built the smart driver model (SDM), which can make timely adjustment according to the speed difference and headway between vehicles. In addition,SDM provides smoother deceleration and acceleration than IDM.
As one of the four elements of traffic, drivers play an important role in the actual traffic. Due to the difference of driver’s technology,reaction speed,physical fitness and other factors, the decision-making also directly affects the stability of traffic flow.Sharmaet al.[31]introduced the driver’s compliance behavior into the vehicle driving strategy,and studied the influence of the driver’s compliance on the stability of traffic flow. Yuet al.[32]proposed an improved car following model considering the memory changes of multiple vehicle gaps,and concluded that the driver’s memory can improve the safety and stability of road traffic flow.
The above research literature shows that whether the micro model or the macro model,using electronic throttle as the feedback control term to improve the model can effectively improve the anti-interference ability of traffic flow and improve the stability of traffic flow. At the same time, although SDM has smooth acceleration and deceleration, it does not consider the driver factor. Can the electronic throttle angle changes with memory as a feedback term be introduced into SDM? How does the angle of electronic throttle change with the driver’s memory affect the traffic flow stability?This series of problems need to be further explored and resolved. Therefore, from the perspective of human-vehicle integration, this paper establishes an extended model considering electronic throttle angle changes with memory, and tries to explore the angle of electronic throttle change with the memory on the stability of traffic flow.
The rest of the paper is structured as follows. Section 2 firstly introduces the proposed model, and then the next generation simulation(NGSIM)vehicle trajectory data is applied to calibrate and evaluate the proposed model. In Section 3,we use the method of linear analysis to analyze the new model.In Section 4, numerical simulation is carried out to study the evolution characteristics of traffic flow in the extended model.The final conclusion is given in Section 5.
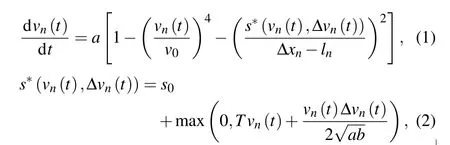
whereais the maximum acceleration,v0indicates the desired velocity in free-flow traffic conditions,lnis the length of thenth vehicle,s0represents the static safety distance,Tis safe headway,and the desired deceleration is expressed asb.
Luet al.[30]proposed an improved IDM named as SDM,which optimizes the problem of large feedback delay in the car following

2. Model description
2.1. The representation of the ETSDM
On the basis of the Gipps model,[33]Treiberet al.[20]proposed an intelligent driver model(IDM)considering different congestion dynamics. The IDM essentially defined an acceleration target command generated by the following function:
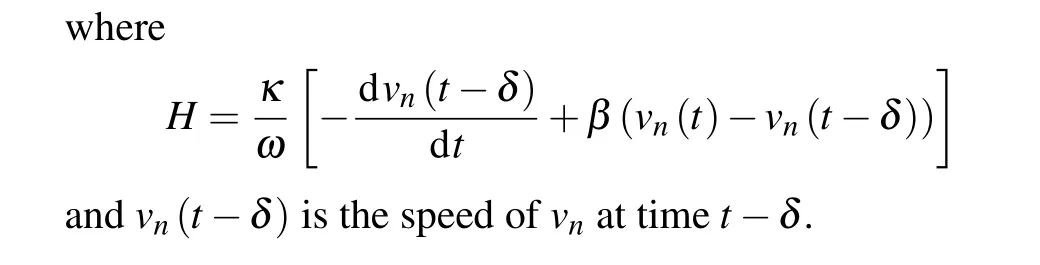
whereθn(t)andθn(t-δ)refer to the angle of the electronic throttle at timetandt-δ,δdenotes the memory step,andκis the driver’s sensitive coefficient.
Ioannouet al.[34]proposed that the opening angle of electronic throttle has the following relationship with the vehicle speed and acceleration
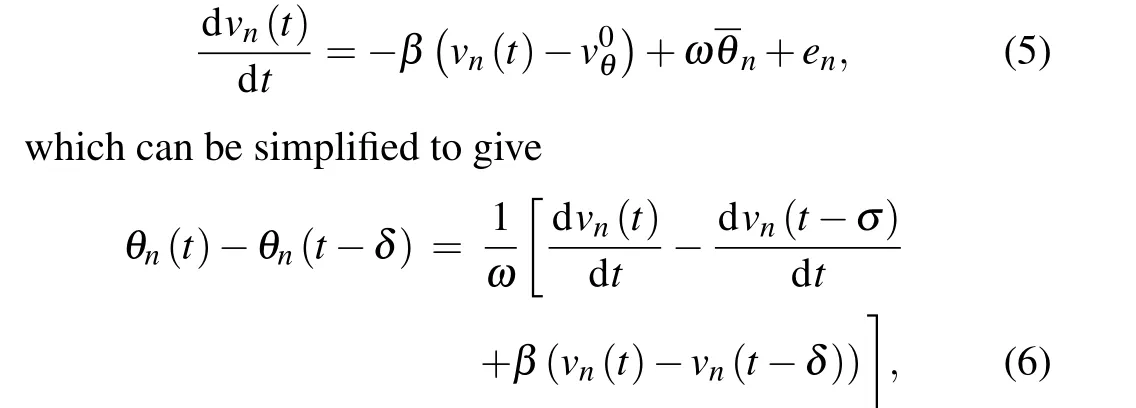
wherev0θis the speed when the electronic throttle angle is 0,andβandωare parameters changing withv0θ.
After further derivation and consolidation,we can get

2.2. Next generation simulation data
Next generation simulation (NGSIM) vehicle trajectory data is used to calibrate and evaluate the ETSDM. Table 1 shows the main data used in this paper.The focus of this paper is on car following behavior, and there will be no overtaking or lane changing phenomenon, but these data include various traffic behaviors. Therefore,in order to ensure the accuracy of the experimental results, we screened out 1467 sets of useful data from 1048576 sets of data for experiments.
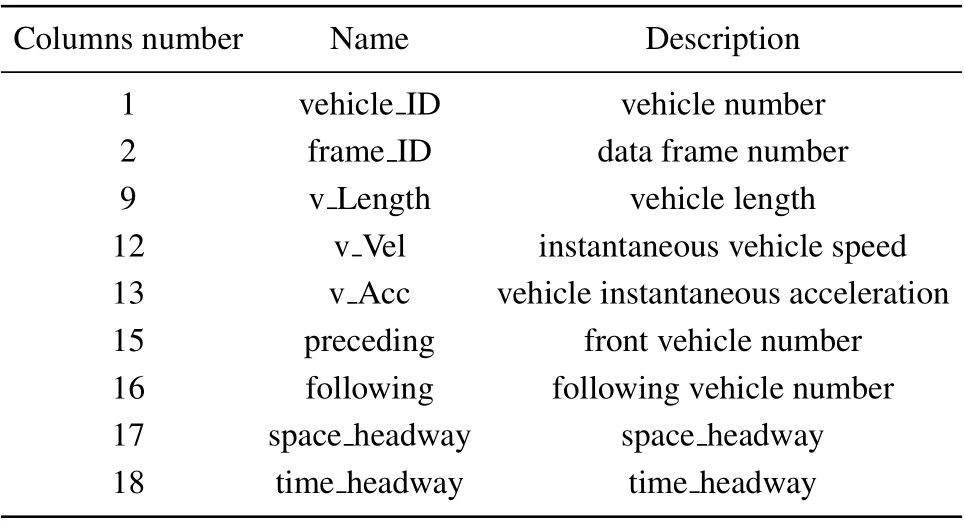
Table 1. Description of the main NGSIM data.
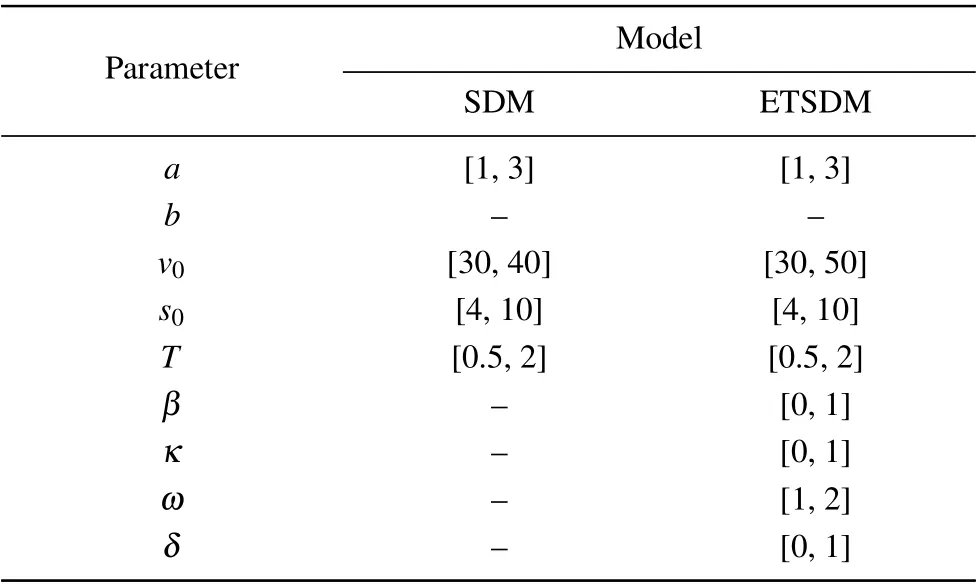
Table 2. Ranges of parameter.
The objective functionFobjof the optimization model for the genetic algorithm is defined as
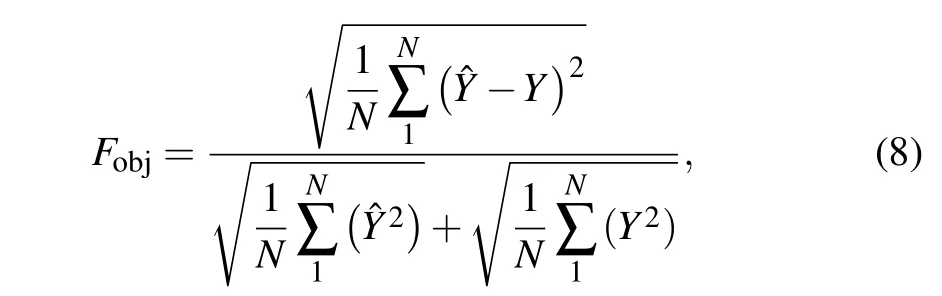
whereNrepresents the sample size, ?Ythe actual acceleration,andYthe simulated acceleration of the model.
According to the existing literature,the ranges of parameters in SDM and ETSDM are given in Table 2. The objective function value of the ETSDM isFobj=0.5631 while the objective function value of the SDM isFobj=0.6235. Figure 1 illustrates the comparison between computational accelerations of the two models and 1467 sets of real acceleration data for calibration. The blue solid line represents the actual acceleration value,and the red solid line and the green solid line represent the acceleration value simulated by SDM and ETSDM,respectively. According to the comparison by using the verification data,we observe that the improved model shows better fitness with the verification data.

Table 3. The parameter calibration results of models.

Fig.1. Comparison of two models with calibration data.
3. Linear stability analysis
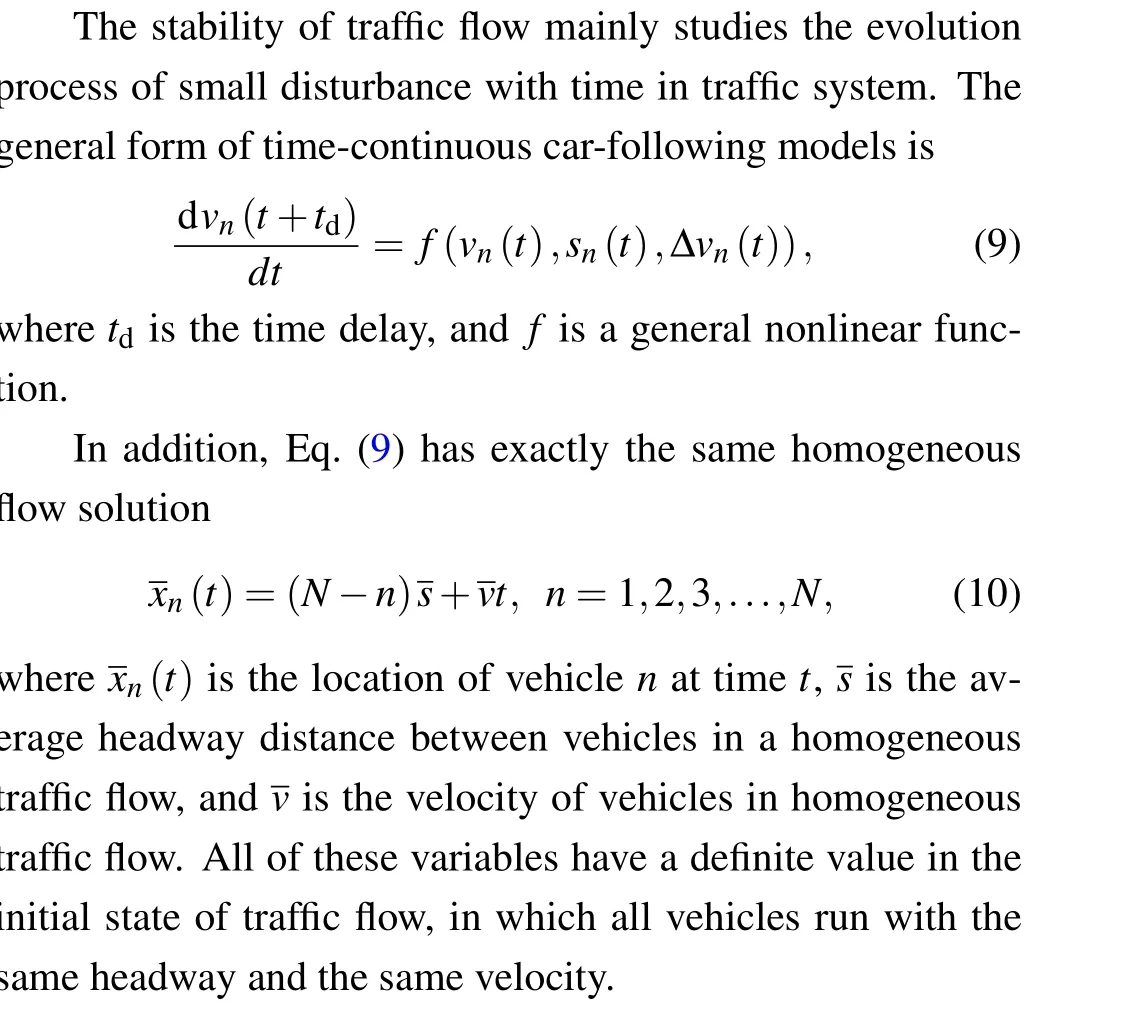
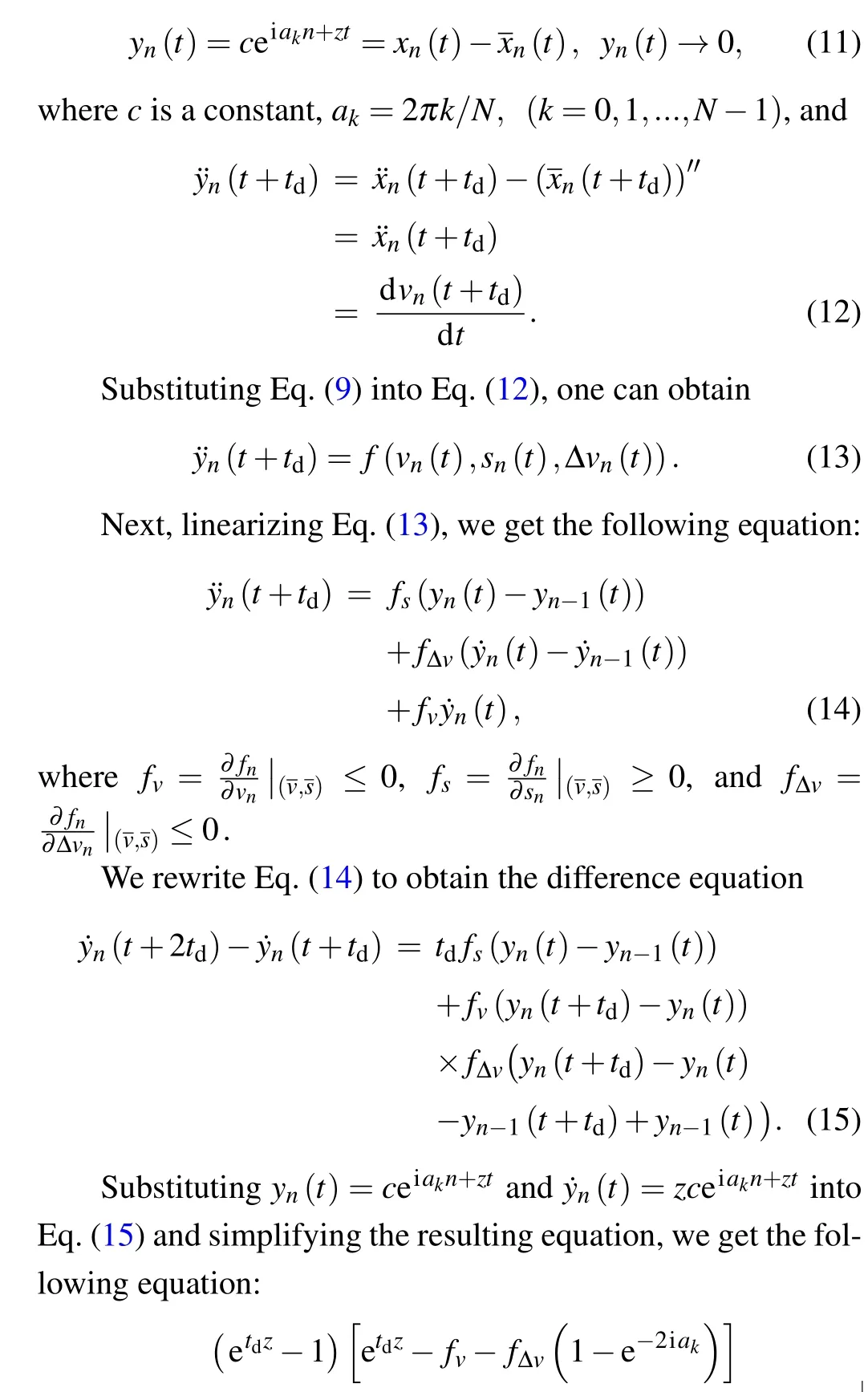
Then,yn(t) denotes the small perturbation from the steady state solution of the vehiclenat timetwith the linear Fourier-mode expanding

We use numerical simulation to draw the neutral stable curve under different conditions. The common parameter values of the two subgraphs in Fig. 2 are as follows:T= 1.5 s,v0= 30 m/s2,s0= 1.5 m/s,β= 0.6 s-1,ω=1.2 m/s2·degree-1,andtd=0.
Figure 2 illustrates that the area above the neutral stability curve is stable and vice versa. Figure 2(a) shows the neutral stability curve with different parametersκ=0.1,0.3,0.5,and 0.7.Among these neutral stability curves,it is obvious that the stable region ofκ=0.7 is larger than that ofκ=0.1, which means that the stability of traffic flow can be theoretically improved by improving the sensitivity coefficient of the driver’s memory. Simultaneously,from Fig.2(b),we can observe and compare that with the increase of driver memory time stepδ,the scope of stability area is increasing, and the stability of traffic flow is enhanced. This implies that the memory time of the driver plays a positive role in the stability of the traffic flow.

Fig. 2. The headway-maximum acceleration phase diagram with different parameter.
4. Simulation results
This section provides some numerical simulation results to analyze the stability of ETSDM vehicles in different scenarios. Specifically,two cases are considered: (i)the driver’s sensitiveκ;and(ii)the time step of the driver’s memoryδ. To facilitate numerical simulation, we discretize Eq. (7) into the following form:

where Δtis the time step and Δt=0.1 s.
We select the following periodic boundary conditions and the initial conditions. The total length of the road is set asL=2000 m and the vehicle length isl=5 m.There will be no overtaking and collision behavior on the road, and the initial speed of all vehicles is0. The parameters selected for simulation areN=50,a=1,T=1.8,v0=30,s0=4,β=0.3,andω=1.2. The simulations last for 4000 s with a time step of 0.1 s.
4.1. Driver’s sensitivity
This test shows the effect of vehicle speed fluctuating with driver sensitivity. The vehicle is equipped with the ETSDM proposed in the second section, and different driver sensitivity coefficients are simulated to draw correct conclusions. Figure 3 is the space-time evolution diagram of the velocity obtained by adjustingκequal to 0.1, 0.2, 0.3, and 0.4,respectively. With the help of Fig.3,one can clearly see how the speed changes. Whenκ=0.1,the response of vehicle speed shows considerable instability,and this fluctuation is amplified downstream, asκincrease, the velocity fluctuation decreases gradually, the vehicle can better follow the speed change of the leading vehicle, and the speed fluctuation is small in the downstream. These results indicate that the driver sensitivity can improve the stability of traffic flow and alleviate traffic congestion. The reason can be analyzed empirically as:drivers with higher sensitivity are more inclined to drive cautiously,and their driving risks are lower than those with lower sensitivity. When the driving status suddenly changes,such as overtaking and emergency stop,the highly sensitive driver can adjust the throttle angle in time to drive the vehicle smoothly.

Fig.3. The space-time evolution of velocity under different values of κ.
Figure 4 is a time-velocity profile diagram corresponding to Fig. 3, and the values of related parameters are consistent with Fig. 3. By comparing the four pictures in Fig. 4, it is obvious that the smaller the value ofκ, the greater the amplitude of the speed fluctuation. The most undesirable behavior appears in Fig. 4(a), starting from the 1000th second, the speed of the vehicle begins to fluctuate significantly, and the downstream turbulence continuesto increase. Meanwhile,the driver’s sensitivity is low, and the vehicle cannot be adjusted in time,resulting in great speed fluctuations,which can easily lead to aggressive driving. On the contrary, with the increase ofκ,the fluctuation range of speed becomes smaller,and the driving state of the vehicle tends to be stable. Which means that the stability of traffic flow can be theoretically improved by considering the driver sensitivity.

Fig.4. The velocity profiles for different parameters κ.
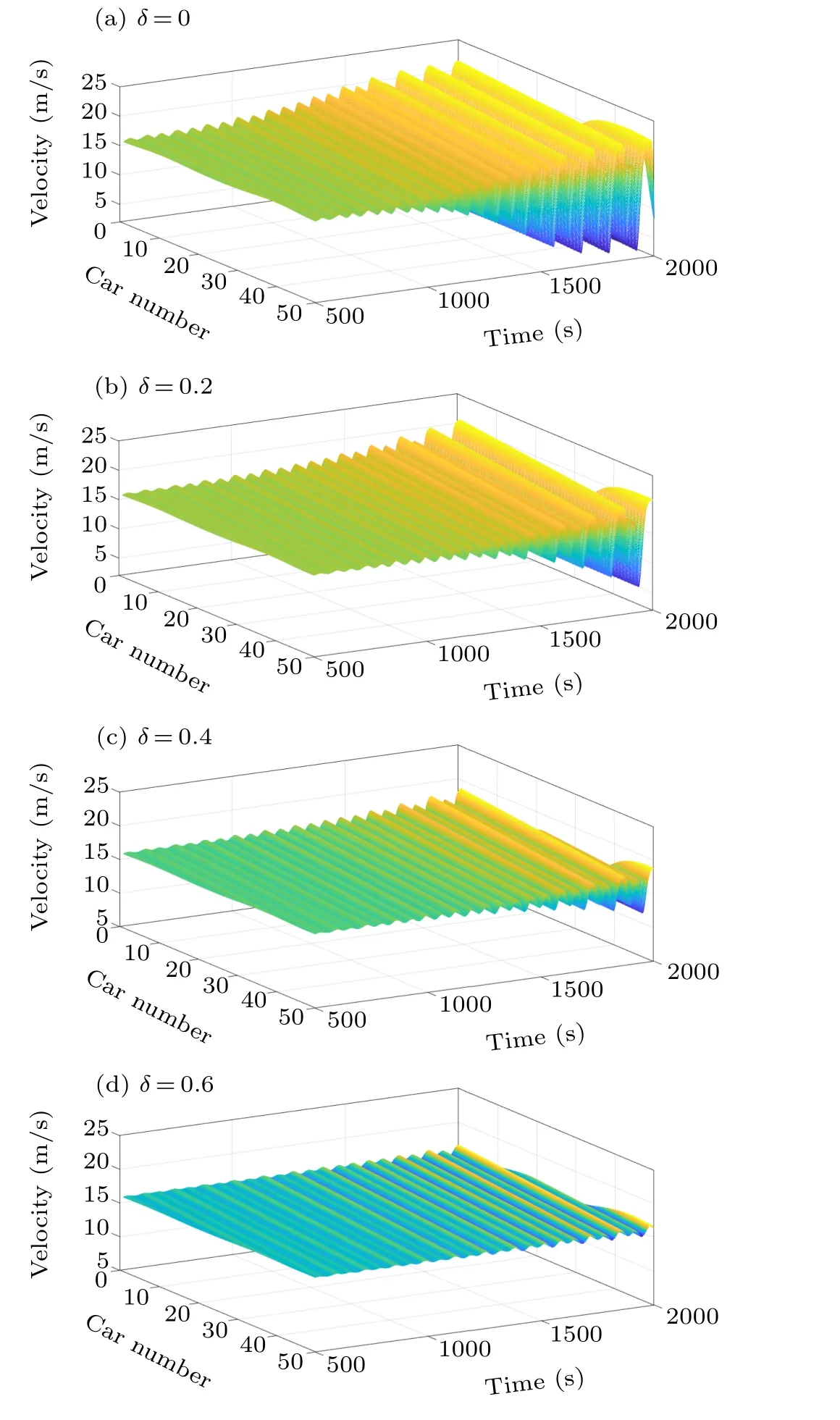
Fig.5. The space-time evolution of velocity under different values of δ.
4.2. Time step of the driver’s memory
Similar to Subsection 4.1,we adopt differentδto explore the relationship between driver’s memory time step and traffic flow stability. Figure 5 is the space-time evolution diagram of the velocity obtained by adjustingδequal to 0, 0.2, 0.4,and 0.6, respectively. In Fig. 5(a), the value ofδis 0, which means that the time step of the driver’s memory is not considered. At this time, the traffic flow is very unstable. As shown in Figs. 5(b)-5(d), withδincreases, the amplitude of the velocity wave fluctuations decreases,which indicates that the change of the electronic throttle angle with memory has a positive effect on the stability of traffic flow.
Figure 6 is a two-dimensional velocity evolution diagram corresponding to Fig. 5. From Fig. 6, we can see the change of velocity intuitively. From the 800th second, the speed in Fig.6(a)fluctuates up and down in the range of 2-22 m/s,and the traffic turbulence is gradually amplified in the downstream.However,with the increase ofδ,the amplitude of speed fluctuation decreases rapidly. As can be seen from Fig. 6(d), the speed is basically maintained at 16 m/s,and the oscillation is amplified very little downstream. This is also consistent with our theoretical analysis: the driver’s time memory step plays a very positive role in the stability of traffic flow.

Fig.6. The velocity profiles for different parameters δ .
5. Concluding remarks
This paper is mainly divided into three parts. Firstly,an extended model is proposed, which uses the change of electronic throttle with memory as a feedback control term.Then, based on the same group of NGSIM data after screening,this paper uses genetic algorithm to calibrate and evaluate the SDM and ETSDM,respectively. The comparison between the calibration results of the two models shows that ETSDM has a higher degree of fitness.
Secondly, the linear stability analysis method is used to derive the stability conditions of the ETSDM. In order to intuitively analyze the stability region of the model,the neutral stability curve of the model is drawn by using the simulation software. It can be found that the driver sensitivity and time memory step have a positive effect on the stability of traffic flow.
Thirdly,in order to deeply understand the evolution characteristics of traffic flow, we carry out the numerical simulation under periodic boundary conditions, and obtain the spatiotemporal evolution graph of speed. The main conclusions of this paper are as follows:
i. Driver sensitivity plays a positive role in the actual traffic,the higher the sensitivity of the driver,the timelier the adjustment of the vehicle,so as to ensure the smooth and rapid driving of the vehicle.
ii. Considering electronic throttle angle changes with memory can improve the stability of traffic flow.
iii. The results of the numerical simulation are consistent with the theoretical analysis.
Acknowledgments
Project supported by the Natural Science Foundation of Zhejiang Province,China(Grant No.LY20G010004)and the the Program of Humanities and Social Science of Education Ministry of China (Grant No. 20YJA630008), and the K. C.Wong Magna Fund in Ningbo University,China.
猜你喜歡
Chinese Physics B(2022年7期)2022-08-01
新高考·英語(yǔ)基礎(chǔ)(高一)(2022年3期)2022-04-29
小學(xué)生作文·小學(xué)低年級(jí)適用(2022年4期)2022-04-27
Chinese Physics B(2022年4期)2022-04-12
走向世界(2021年50期)2021-02-07
作文周刊·小學(xué)一年級(jí)版(2020年40期)2020-10-19
大社會(huì)(2016年6期)2016-05-04
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2015年10期)2016-01-04
軍營(yíng)文化天地(2011年1期)2011-04-04
環(huán)球時(shí)報(bào)(2009-11-16)2009-11-16

- Chinese Physics B的其它文章
- Superconductivity in octagraphene
- Soliton molecules and asymmetric solitons of the extended Lax equation via velocity resonance
- Theoretical study of(e,2e)triple differential cross sections of pyrimidine and tetrahydrofurfuryl alcohol molecules using multi-center distorted-wave method
- Protection of entanglement between two V-atoms in a multi-cavity coupling system
- Semi-quantum private comparison protocol of size relation with d-dimensional GHZ states
- Probing the magnetization switching with in-plane magnetic anisotropy through field-modified magnetoresistance measurement