
CO2 emission control in new CM car-following model with feedback control of the optimal estimation of velocity difference under V2X environment?
2021-10-28 07:19:26GuangHanPeng彭光含RuiTang湯瑞HuaKuang鄺華HuiLiTan譚惠麗andTaoChen陳陶
Chinese Physics B 2021年10期
Guang-Han Peng(彭光含) Rui Tang(湯瑞) Hua Kuang(鄺華)Hui-Li Tan(譚惠麗) and Tao Chen(陳陶)
1College of Physical Science and Technology,Guangxi Normal University,Guilin 541004,China
2Boyuan Scientific Instruments(Zhenjiang)Co.,Ltd,Zhenjiang 212003,China
Keywords: traffic flow,optimal velocity model,numerical simulation
1. Introduction
With the rapid development of economy, the number of domestic vehicles is increasing year by year, which leads to more and more serious congestion in the traffic system. Traffic jams not only increase social costs, waste energy,but also aggravate environmental pollution.[1]The exhaust emission of urban traffic has become the biggest source of urban air pollution, which is more and more harmful to people’s health and seriously affects the life of residents. Therefore,domestic and foreign scholars have done some researches in order to study the internal operation mechanism of transportation system. In 1961,Newell[2]presented a car-following model described by a differential equation of the first order. In 1995, Bando[3]built an optimized velocity model to simulate the phenomenon caused by traffic congestion on the actual road. After that, a few scholars[4–13]have proposed a series of improved models based on the modeling idea of optimal velocity model.Among these research results,coupled map(CM)car-following model plays an important role in studying traffic congestion control.It can not only reveal a variety of traffic phenomena,but also provide a concise algorithm for numerical simulation, which is suitable for describing complex traffic control problems. In 1999, Konishiet al.[4]studied the vehicle running control on single lane under open boundary conditions by using CM carfollowing model and setting the term of delayed feedback control, and proposed a scheme to curb traffic congestion. In 2004, Geet al.[5]came up with an extended car following model by incorporating an intelligent transportation system in traffic. In 2006, Zhao and Gao[6]proposed a simpler and effective control method of traffic congestion. Their feedback control term is proportional to the relative speed between the front nearest neighbor vehicle and current vehicle,which substitutes a single feedback parameter for four parameters.Thus,the feedback gain was obtained by applying the stability theory and the strict mathematical analysis was carried out. It is found that traffic flux becomes bigger than before with the consideration of control term via numerical simulation,which has restrained traffic congestion control effectively. In 2007,Hanet al.[7]came up with CM car-following model based on ITS application. In 2009, Shenet al.[8]put forward a control signal including the velocity differences of the two vehicles in front. Subsequently,Geet al.[9,10]proposed a modified coupled map car-following model in which two successive vehicle headways in the optimal velocity function and velocity differences in front of the considering vehicle is incorporated.In 2015,Fanget al.[11]considered the velocity difference between two successive vehicles in the model. In 2016, Zhenget al.[12]put forward a new model by considering safe headway effect of the two preceding cars on the following one. In recent years, some scholars considered the effect of the electronic throttle dynamics. In 2020, Liet al.[13]considered the opening angle difference of electronic throttle and the delayed velocity difference.
With the development of 5G communication and intelligent transportation system,drivers can obtain a series of driving information to timely and effectively adjust the running state of vehicles under the V2X environment. With the application of V2X(vehicle to everything)technologies,including V2V (vehicle to vehicle), V2I (vehicle to infrastructure),V2N (vehicle to network), and V2P (vehicle to pedestrian),drivers can obtain massive traffic information and adjust their car-following behavior according to the information transmission via V2X technology. In 2013, Alsabaanet al.[14]explored the influence of V2V environment on vehicle energy consumption. In 2015, Liet al.[15]studied the influence of signal control on ecological driving of electric vehicles under V2X environment. In 2019, Penget al.[16]put forward the delayed-feedback control method for car-following model with the combination of V2V communication. In 2021,Wanget al.[17]proposed a simulation framework based on the carfollowing model and the cellular automata under the V2X environment. Thus, the vehicles in the system can run collaboratively and traffic congestion was relieved under V2X environment. In the actual traffic environment, the effect of the optimal estimation of velocity difference is very important for vehicle operation. However, in the CM car-following model,the effect of the optimal estimation of velocity difference is rarely reported. In this paper,by considering the effect of the optimal estimation of velocity difference, we put forward a new congestion control model under V2X environment.Based on the modern control theory, we will carry out the stability analysis of control model and win the control method of the feedback gain parameters with cybernetics idea. Through numerical simulation with the aid of its own development software,we can realize to control the model validation,especially carbon dioxide emission control.
And this paper is mainly divided into the following parts:In Section 2, a new CM car-following model is presented.In Section 3, we get stability analysis of the new CM carfollowing model, and the value of the parameterkis also derived. In Section 4,we introduce the CO2emission estimation model. In Section 5,numerical simulation results will be carried out. Finally,conclusions are drawn in Section 6.
2. New CM car-following model
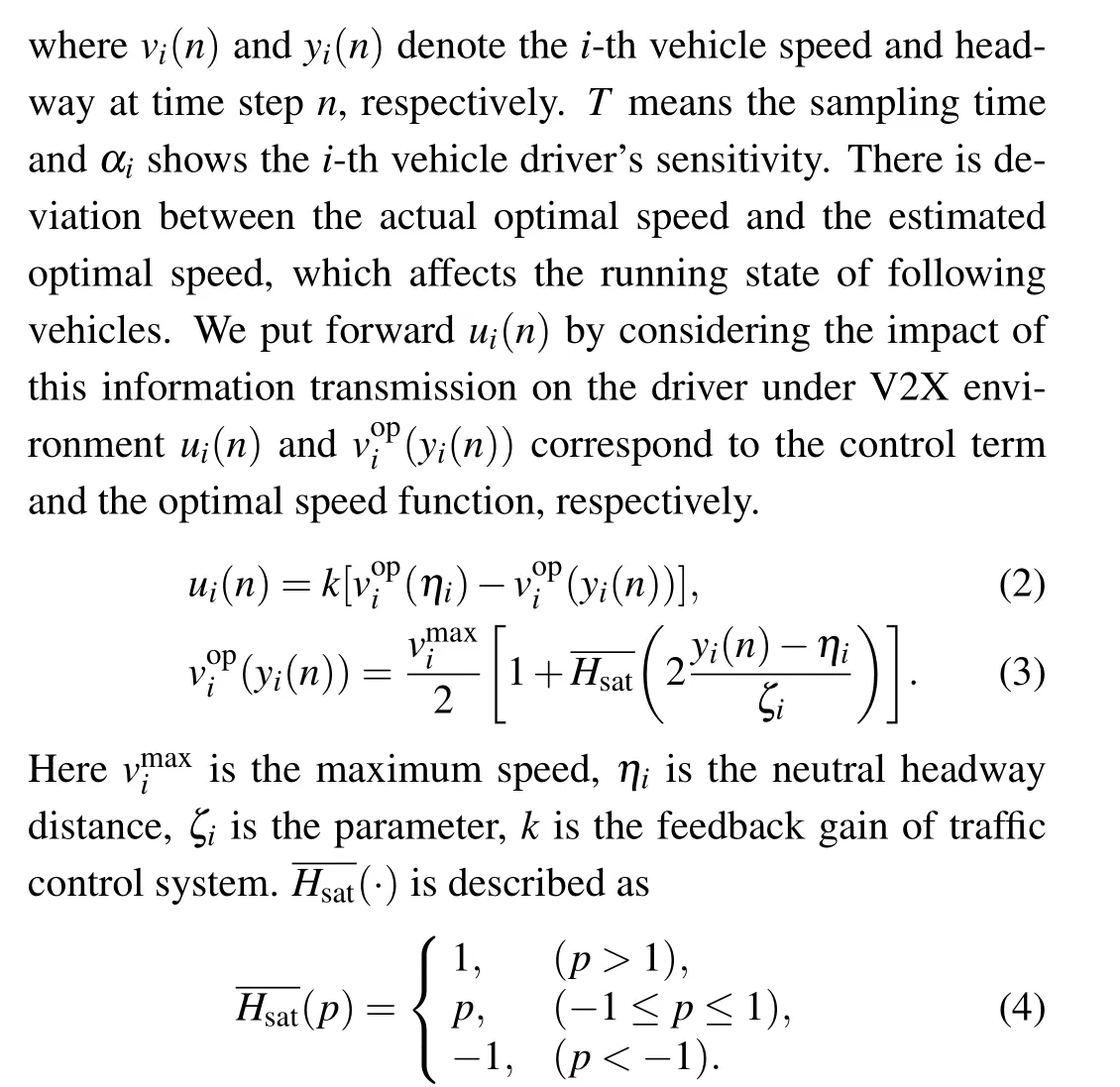
Figure 1 shows a schematic of the car-following model.Based on the CM car-following model, we propose a new CM car-following model with the consideration of the influence of the optimal estimation of velocity difference (called for OEVD-CM car-following model)under V2X environment as follows:

To ensure that the team can stay in formation for a long time and avoid the collisions and backward motions, all the vehicles adopt the full-braking action

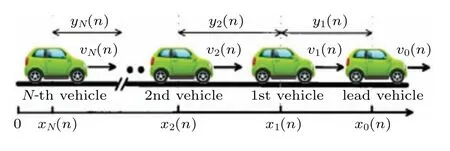
Fig.1. The schematic diagram of the car-following model.
3. Stability analysis
In this section, the steady state of the system is assumed as
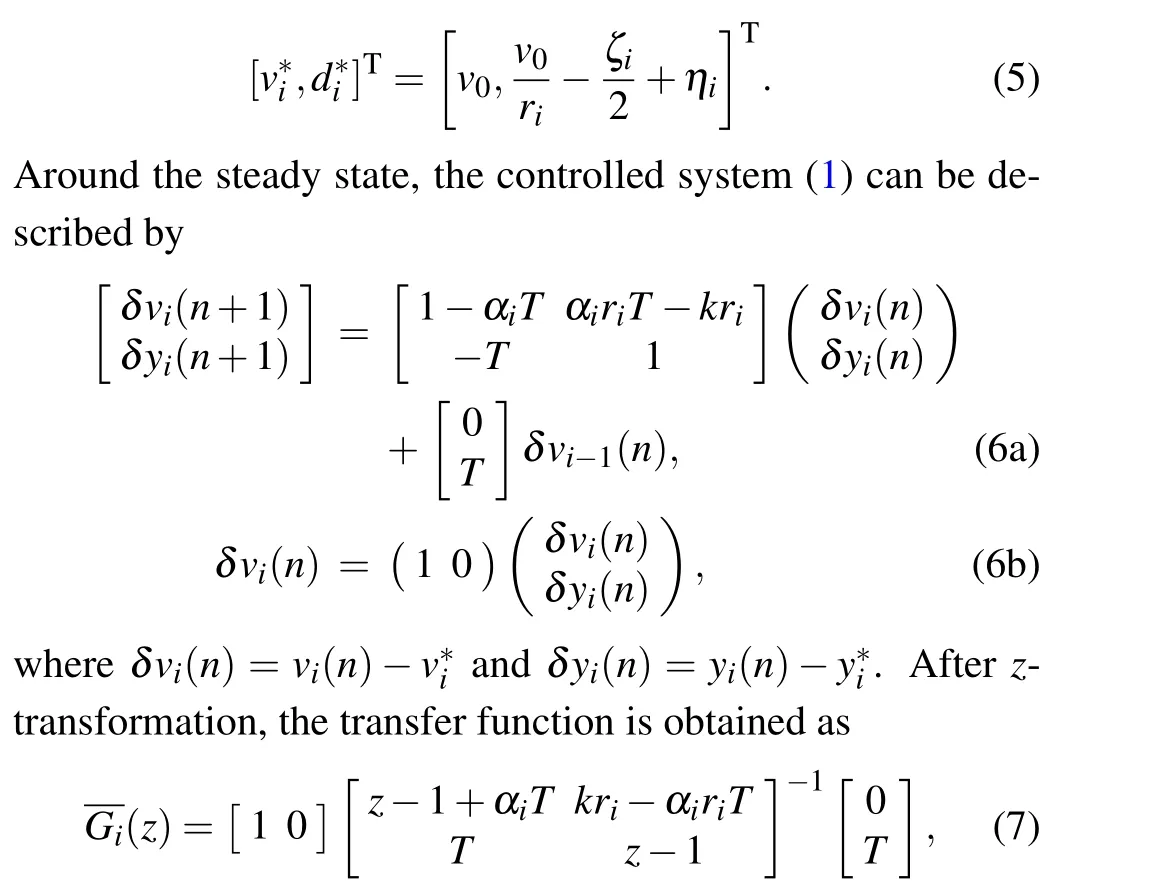
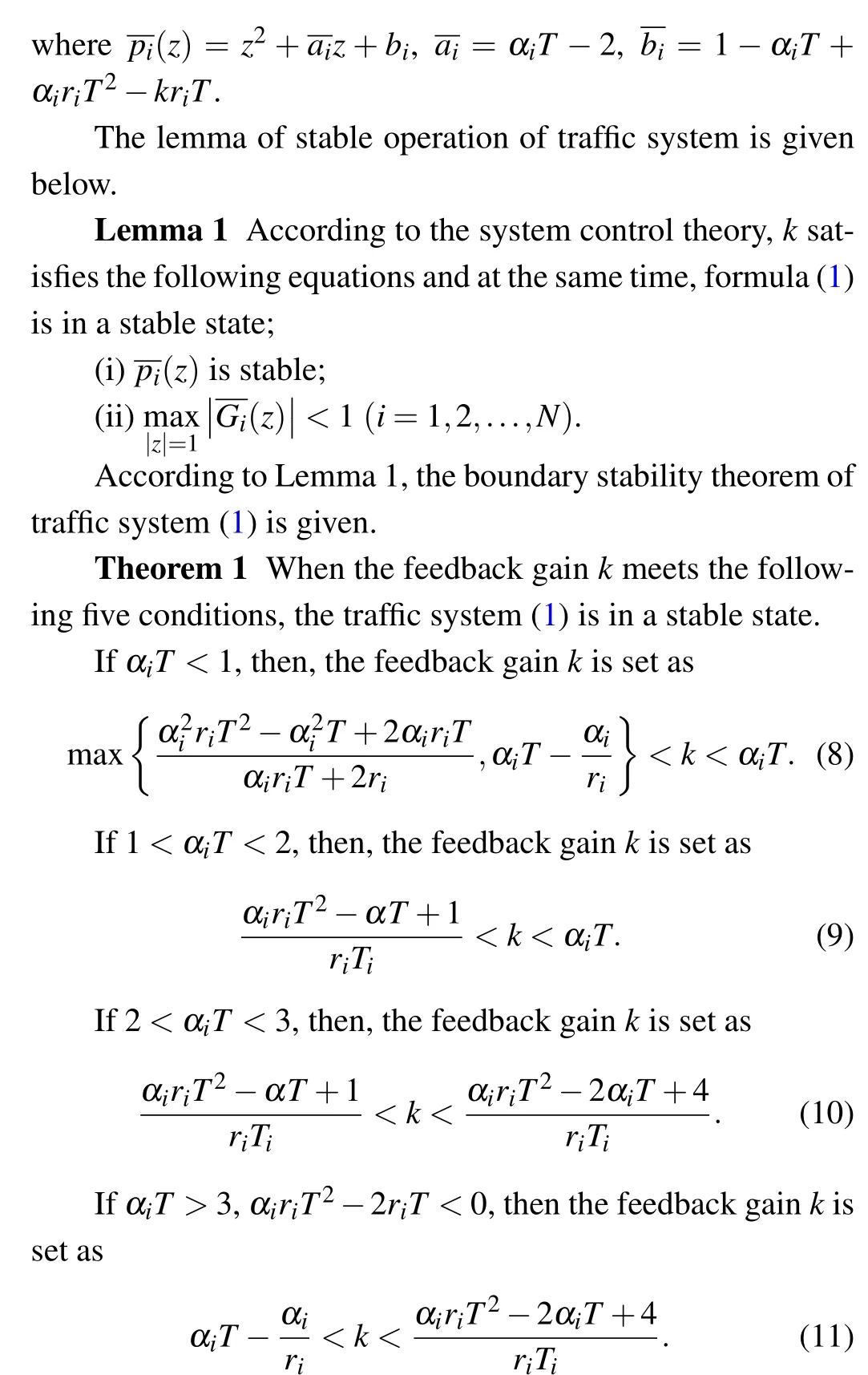
According to the above conditions,congestion control of traffic system(1)is realized by setting feedback gaink
4. CO2 emission estimation model
Road and traffic flow conditions will affect a car’s CO2emission.[18]According to different road conditions,vehicles will produce different CO2emissions. Even if road conditions are good, traffic status has a great impact on a car’s CO2emission,and traffic congestion will produce more CO2.Oguchi[19]presented a formula to estimate vehicle CO2emissions as follows:
HereEis the total CO2emission(in unit kg),Kcis the emission coefficient between gasoline consumed and CO2emission,βi(i=1,2,3)is the distance coefficients.δkis Heaviside function

This model is very suitable for our study to calculate a vehicle’s CO2emission theoretically.
5. Simulation results
In order to verify that the theoretical derivation is correct,the new model is simulated numerically under open boundary conditions, and the initial value of parameters is set asηi=25.0 m,ζi=23.3 m,vmax=33.6 m/s,v0=20 m/s,T=0.1 s,αi=2.0 s?1,ymini=7.02 m,ri=vmax/ζi ≈1.44 s?1,β1=0.3,β2=0.028,β3=0.056.
The initial state of the team is adopted as follows:

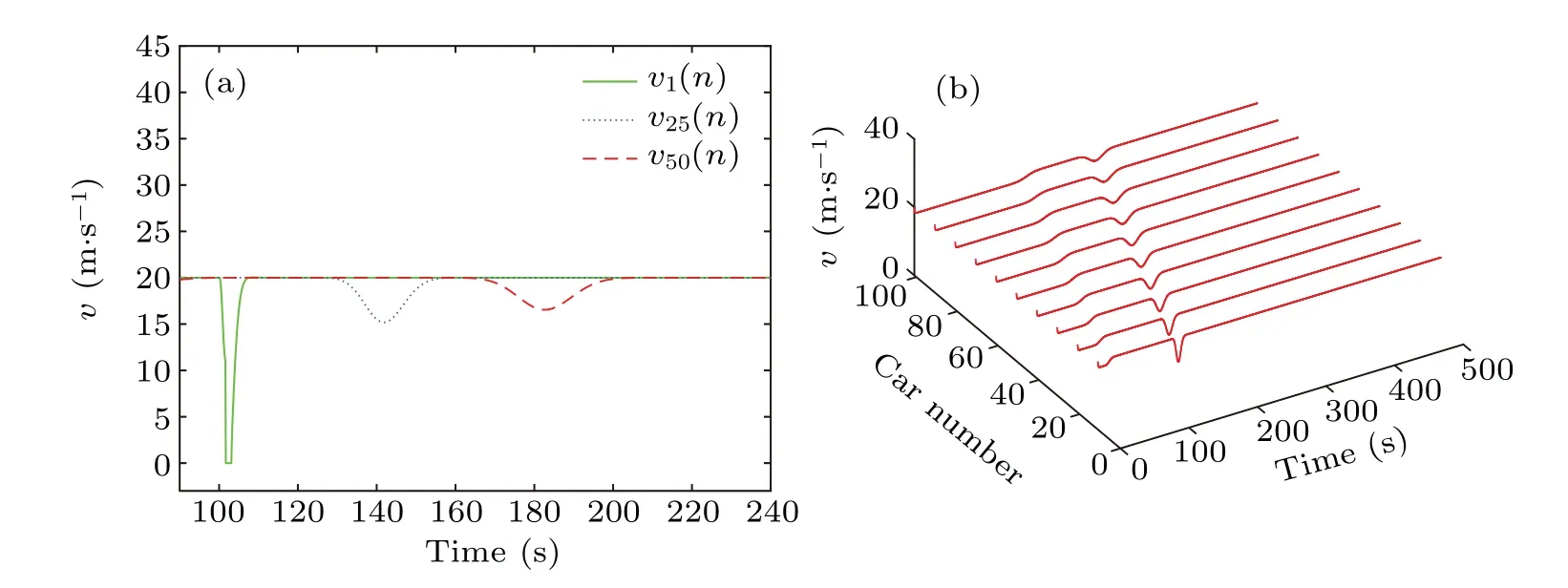
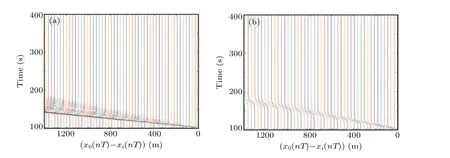
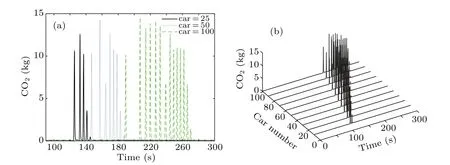
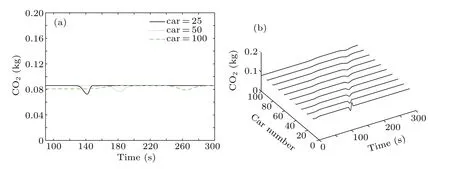
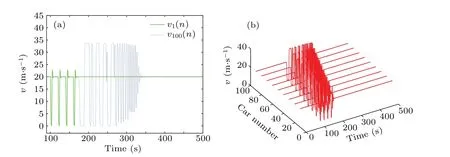
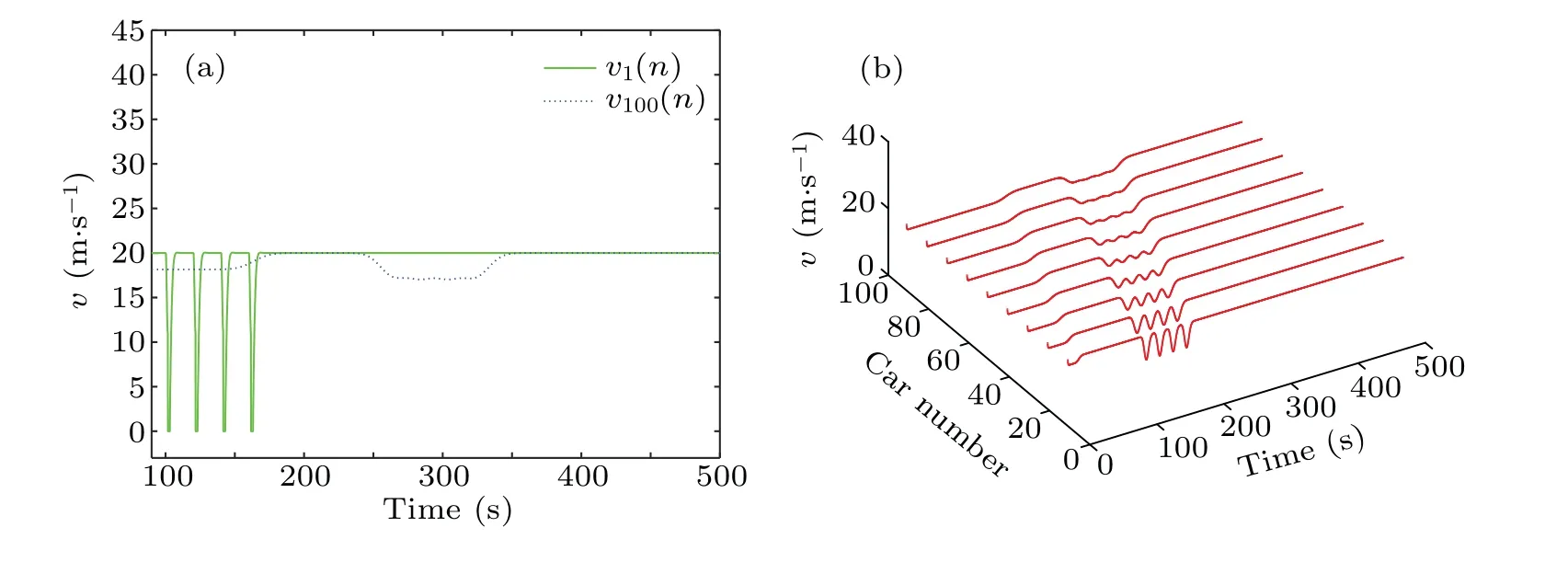
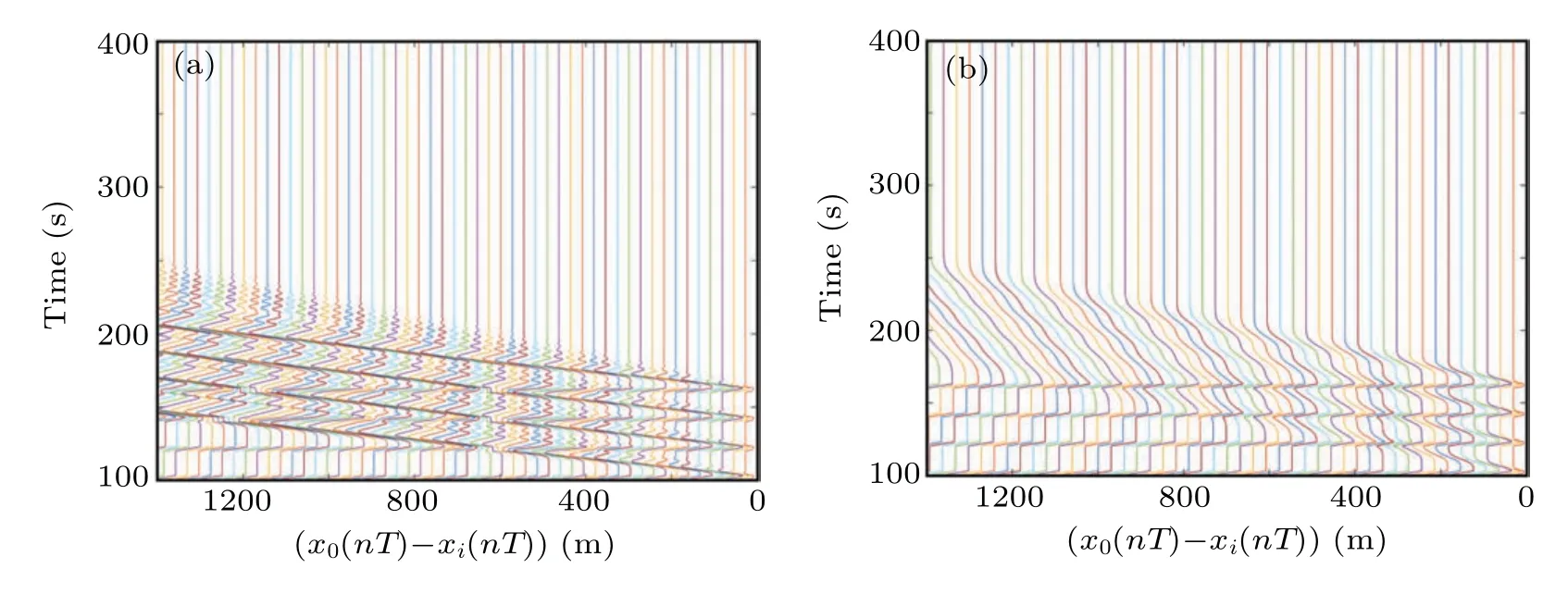
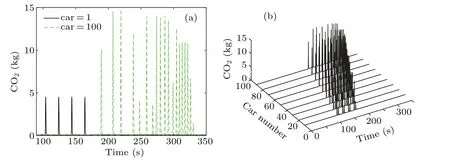
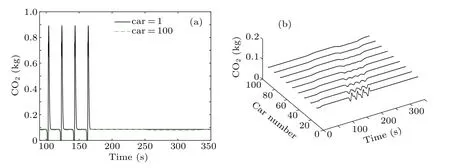
Simulation scenarios are set firstly: we assume that the first running vehicle stopped at 100 s for duration of 3 s to observe the state evolution of the entire fleet. According to the stability condition of the traffic system,the feedback gain range is determined by parameters for the OEVD-CM carfollowing model. From Theorem 1, we get the value range of the feedback gain being 0.0737 Fig.2. The velocity distribution for CM car-following model as the leading vehicle stops suddenly for only time. Firstly, the leading-vehicle stops suddenly for only time and the three vehicles are observed for the first,the 25-th,and the 50-th vehicles. Figures 2 and 3 show the temporal velocity behavior viewed from two and three dimensions,respectively.By comparison, it is clearly seen that the fluctuation of the speed of the OEVD-CM model is significantly reduced and the traffic flow runs more smoothly due to the addition of new feedback control. Furthermore,figure 4 shows the space–time plot when the leading vehicle stops suddenly for only time. By comparison,it can be clearly seen that the oscillation amplitude is relatively flat between the head car and the following car head space due to the addition of feedback control term for the OEVD-CM car-following model, which implies the stability of the traffic system becomes better. Moreover,the CO2emissions are viewed over time from two and three dimensions in Figs.5 and 6,which implies that the OEVD-CM model is lower CO2emissions due to the addition of new feedback control. Secondly, we observe the leading vehicle stopping suddenly for four times. Figures 7 and 8 respectively present the temporal velocity from two and three dimensions for the two vehicles including the first and the 100-th vehicles. By comparison,the fluctuation of the speed of the OEVD-CM model becomes smaller,which shows that the traffic flow runs more smoothly because of new feedback control term. Fig.3. The velocity distribution for OEVD-CM car-following model as the leading vehicle stops suddenly for only time. Fig.4. Space–time diagram for CM car-following model and OEVD-CM car-following model as the leading vehicle stops suddenly for only time. Fig.5. CO2 emission for CM car-following model as the leading vehicle stops suddenly for only time. Fig.6. CO2 emission for OEVD-CM car-following model as the leading vehicle stops suddenly for only time. Fig.7. The velocity distribution for CM car-following model as the leading vehicle stops suddenly for four times. Fig.8. The velocity distribution for OEVD-CM car-following model as the leading vehicle stops suddenly for four times. Figure 9indicates the space–time plot under the leading vehicle stopping suddenly for four times. From Fig.9, It tells us that the oscillation amplitude of the headway space is relatively flat since the new feedback control term is considered, which indicates that the traffic stability becomes better with new feedback control. Fig.9. Space–time diagram for CM car-following model and OEVD-CM car-following model as the leading vehicle stops suddenly for four times. Fig.10. CO2 emission for CM car-following model as the leading vehicle stops suddenly for four times. Fig.11. CO2 emission for OEVD-CM car-following model as the leading vehicle stops suddenly for four times. Figures 10 and 11 represent the CO2emissions over time from two and three dimensions, respectively. Obviously, the lower CO2emission is observed by considering the new feedback control from Figs.10 and 11. Based on the CM car-following model, a new coupled map car-following model is proposed by considering the influence of the estimated optimal speed difference on the traffic flow under the V2X environment. At the same time,on the basis of the OEVD-CM car-following model with new feedback control,the stability condition of the traffic system is analyzed by applying the system control theory, and the critical conditions to maintain stability are obtained for the traffic system.The results from stable condition and CO2emissions mean that the OEVD-CM car-following model can make the traffic system more cooperative, more anti-interference, and less environmental pollution.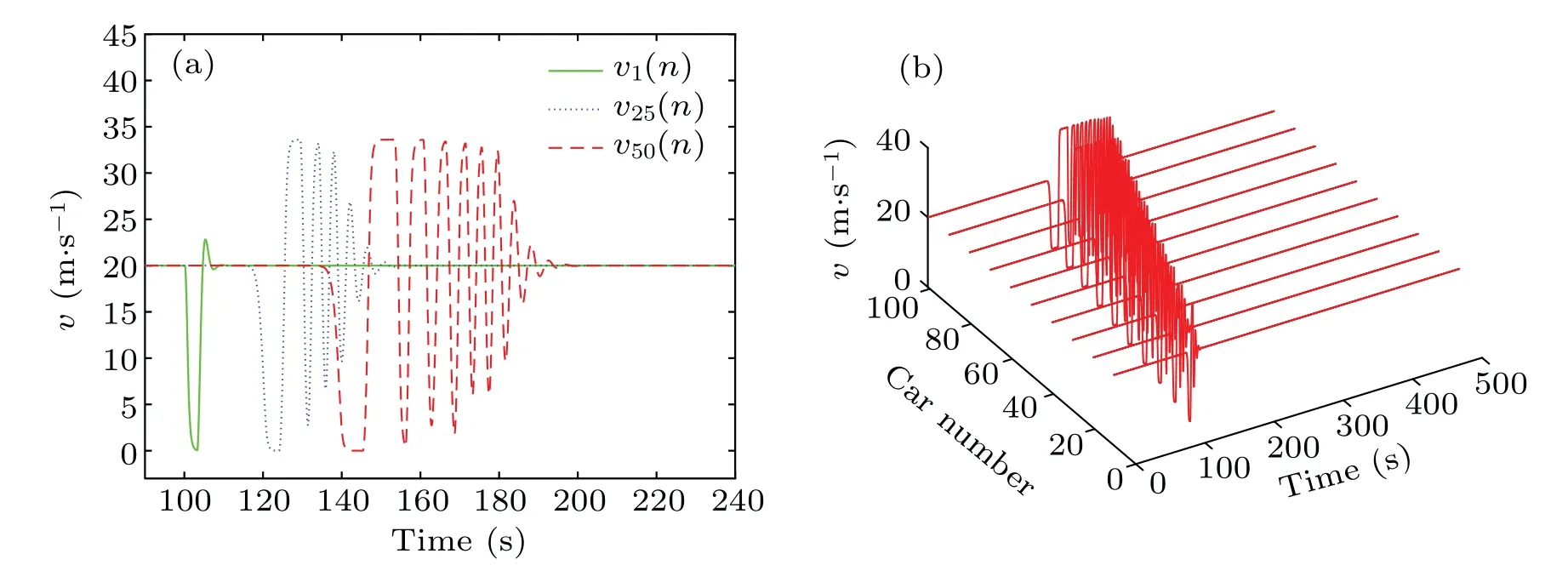
6. Conclusion

- Chinese Physics B的其它文章
- Physical properties of relativistic electron beam during long-range propagation in space plasma environment?
- Heterogeneous traffic flow modeling with drivers’timid and aggressive characteristics?
- Optimized monogamy and polygamy inequalities for multipartite qubit entanglement?
- Non-peripherally octaalkyl-substituted nickel phthalocyanines used as non-dopant hole transport materials in perovskite solar cells?
- Dual mechanisms of Bcl-2 regulation in IP3-receptor-mediated Ca2+release: A computational study?
- Diffusion of nucleotide excision repair protein XPA along DNA by coarse-grained molecular simulations?