分數(shù)階不確定Like-Bao系統(tǒng)的有限時間同步
2020-02-10 02:35:00毛北行
吉林大學(xué)學(xué)報(理學(xué)版) 2020年1期
毛 北 行
(鄭州航空工業(yè)管理學(xué)院 數(shù)學(xué)學(xué)院, 鄭州 450015)
混沌分析及其同步控制目前已引起人們廣泛關(guān)注[1-7].文獻[8]研究了分數(shù)階不確定Duffling混沌系統(tǒng)的終端滑模同步; 文獻[9]基于適應(yīng)轉(zhuǎn)移函數(shù)滑模方法研究了分數(shù)階Genesio-Tesi混沌系統(tǒng)的同步; 文獻[10]用兩種方法研究了分數(shù)階Newton-Leipnik混沌系統(tǒng)滑模同步; 文獻[11]研究了糾纏混沌系統(tǒng)的比例積分滑模同步; 文獻[12]研究了一類復(fù)雜網(wǎng)絡(luò)系統(tǒng)的有限時間函數(shù)投影同步; 文獻[13]研究了時滯神經(jīng)網(wǎng)絡(luò)混沌系統(tǒng)的有限時間反饋同步; 文獻[14]研究了一類神經(jīng)網(wǎng)絡(luò)混沌系統(tǒng)的有限時間同步; 文獻[15]研究了分數(shù)階超混沌Bao系統(tǒng)的比例積分滑模同步; 文獻[16]研究了一類四維Like-Bao混沌系統(tǒng)的動力學(xué)分析; 文獻[17]研究了超混沌Bao系統(tǒng)線性狀態(tài)反饋控制及自適應(yīng)控制.在此基礎(chǔ)上, 本文研究分數(shù)階不確定Like-Bao系統(tǒng)的有限時間同步, 根據(jù)分數(shù)階有限時間同步理論給出Like-Bao系統(tǒng)達到有限時間同步的充分條件.
1 系統(tǒng)描述及主要結(jié)果
定義1[18]Caputo分數(shù)階導(dǎo)數(shù)定義為

考慮Like-Bao混沌系統(tǒng)[16]
(1)
其中:a=38;b=6;c=20;k=2.該系統(tǒng)的4個Lyapunov指數(shù)分別為0.023 864,-2.895 738,-0.048 464,-6.085 664, 此時出現(xiàn)吸引子, 其軌跡相圖如圖1所示.
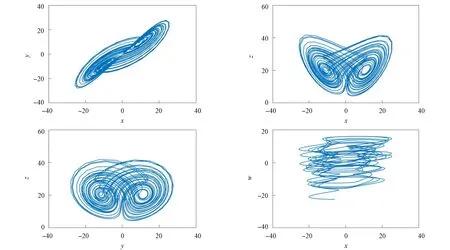
圖1 系統(tǒng)(1)的軌跡
考慮分數(shù)階Like-Bao系統(tǒng)
(2)
其中:a=38;b=6;c=20;k=2;q=0.927.該系統(tǒng)的4個Lyapunov指數(shù)分別為1.987,0.071,0,-18.058, 此時出現(xiàn)混沌吸引子, 分數(shù)階Like-Bao系統(tǒng)的吸引子相圖如圖2所示.
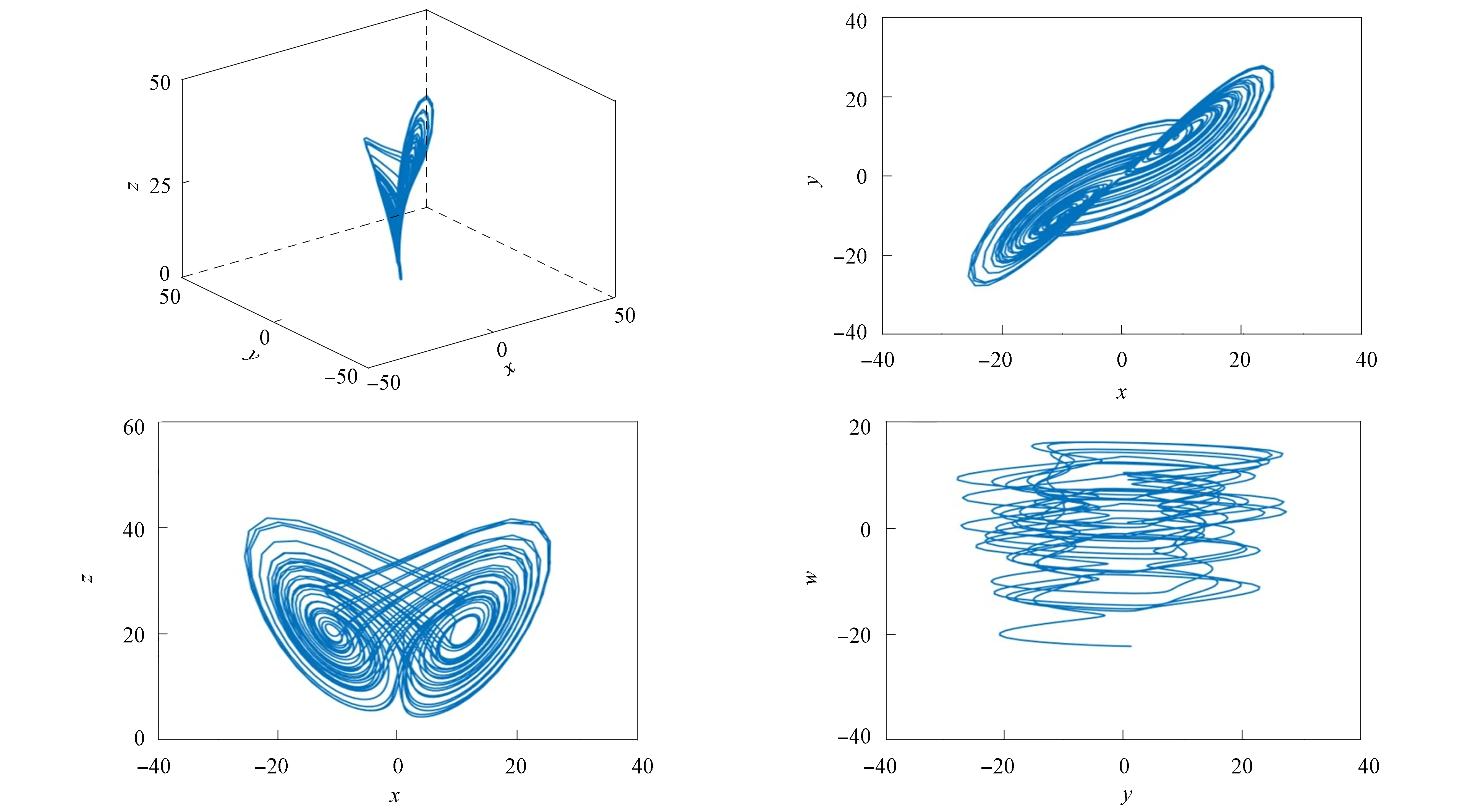
圖2 系統(tǒng)(2)的吸引子相圖
假設(shè)Like-Bao系統(tǒng)的主從系統(tǒng)均具有不確定性, 其主系統(tǒng)為
(3)
其中Δi(i=1,2,3,4)為未知參數(shù)或有界擾動, |Δi|≤ρi,ρi>0.Like-Bao系統(tǒng)的從系統(tǒng)為
(4)
其中Δj(j=5,6,7,8)為響應(yīng)系統(tǒng)未知參數(shù)或有界擾動, |Δj|≤ρj,ρj>0.
定義e1=x1-x,e2=y1-y,e3=z1-z,e4=ω1-ω, 則有
(5)


V1-η(t)≤V1-η(t0)-p(1-η)(t-t0),t0≤t≤T, 且V(t)=0,t≥T,
假設(shè)1γ1≥ρ1+ρ5,γ2≥ρ2+ρ6,γ3≥ρ3+ρ7,γ4≥ρ4+ρ8.
定理1在假設(shè)1條件下, 設(shè)計控制律:
則Like-Bao系統(tǒng)的主從系統(tǒng)(3)和(4)是有限時間同步的.其中:


證明: 根據(jù)引理1可得
證畢.
作為分數(shù)階系統(tǒng)的特例, 考慮不確定整數(shù)階Like-Bao系統(tǒng):
(6)
其中Δi(i=1,2,3)為未知參數(shù)或有界擾動, |Δi|≤ρi,ρi>0.以式(6)作為響應(yīng)系統(tǒng)
(7)
其中Δj(j=4,5,6)為響應(yīng)系統(tǒng)未知參數(shù)或有界擾動, |Δj|≤ρj,ρj>0.
定義e1=x1-x,e2=y1-y,e3=z1-z,e4=ω1-ω, 則
(8)
定理2在假設(shè)1的條件下, 設(shè)計控制律:
根據(jù)引理2可得結(jié)論.
2 數(shù)值仿真
下面采用預(yù)估校正法進行MATLAB仿真, 選取步長為0.01, 數(shù)值仿真時間T=20 s.a=38,b=6,c=20,k=2,q=0.927, 初值設(shè)為(x(0),y(0),z(0),ω(0))=(0.4,0.1,0.3,0.5),(x1(0),y1(0),z1(0),ω1(0))=(1.4,1.2,0.3,0.8),β=0.873,Δ1=0.2sint,Δ2=sint,Δ3=0.5cost,Δ4=cost,Δ5=sint,Δ6=0.5sint,Δ7=cost,Δ8=sint.控制增益γ1=2,γ2=2,γ3=2,γ4=2,ρ1=0.2,ρ2=1,ρ3=0.5,ρ4=1,ρ5=1,ρ6=0.5,ρ7=1,ρ8=1, 定理1和定理2的系統(tǒng)誤差分別如圖3和圖4所示.由圖3和圖4可見, 初始時刻誤差相差較大, 距離原點較遠, 隨著時間推移逐漸趨近原點, 且趨于一致.
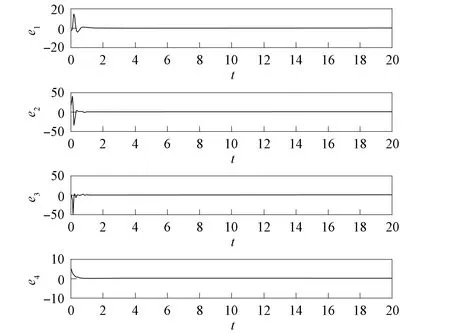
圖3 定理1的系統(tǒng)誤差
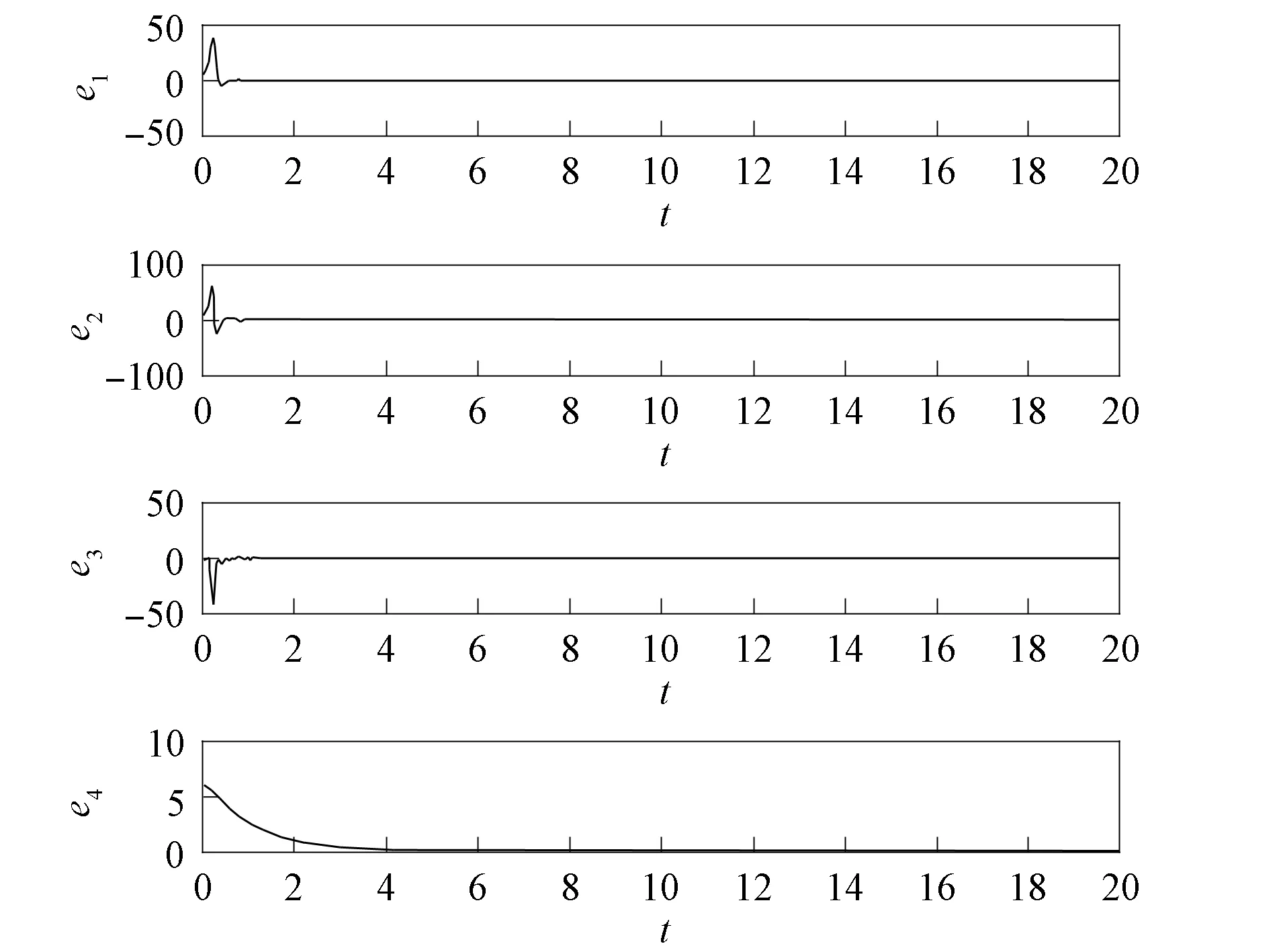
圖4 定理2的系統(tǒng)誤差
綜上, 本文研究了分數(shù)階不確定Like-Bao系統(tǒng)的有限時間同步, 根據(jù)分數(shù)階系統(tǒng)有限時間同步理論得到了對同步時間的估計.結(jié)果表明, Like-Bao混沌系統(tǒng)的驅(qū)動響應(yīng)可在有限時間內(nèi)取得同步, 且該結(jié)論可延伸至整數(shù)階Like-Bao系統(tǒng).
猜你喜歡
數(shù)學(xué)年刊A輯(中文版)(2023年4期)2024-01-04 05:47:40
數(shù)學(xué)物理學(xué)報(2019年3期)2019-07-23 01:15:30
中國慣性技術(shù)學(xué)報(2019年6期)2019-03-04 09:50:06
測控技術(shù)(2018年3期)2018-11-25 09:45:40
北京航空航天大學(xué)學(xué)報(2017年4期)2017-11-23 05:48:25
中國慣性技術(shù)學(xué)報(2017年1期)2017-06-09 08:15:14
福建中學(xué)數(shù)學(xué)(2016年4期)2016-10-19 05:09:02
系統(tǒng)工程與電子技術(shù)(2016年7期)2016-08-21 13:58:58
裝備環(huán)境工程(2015年5期)2015-02-28 01:20:35